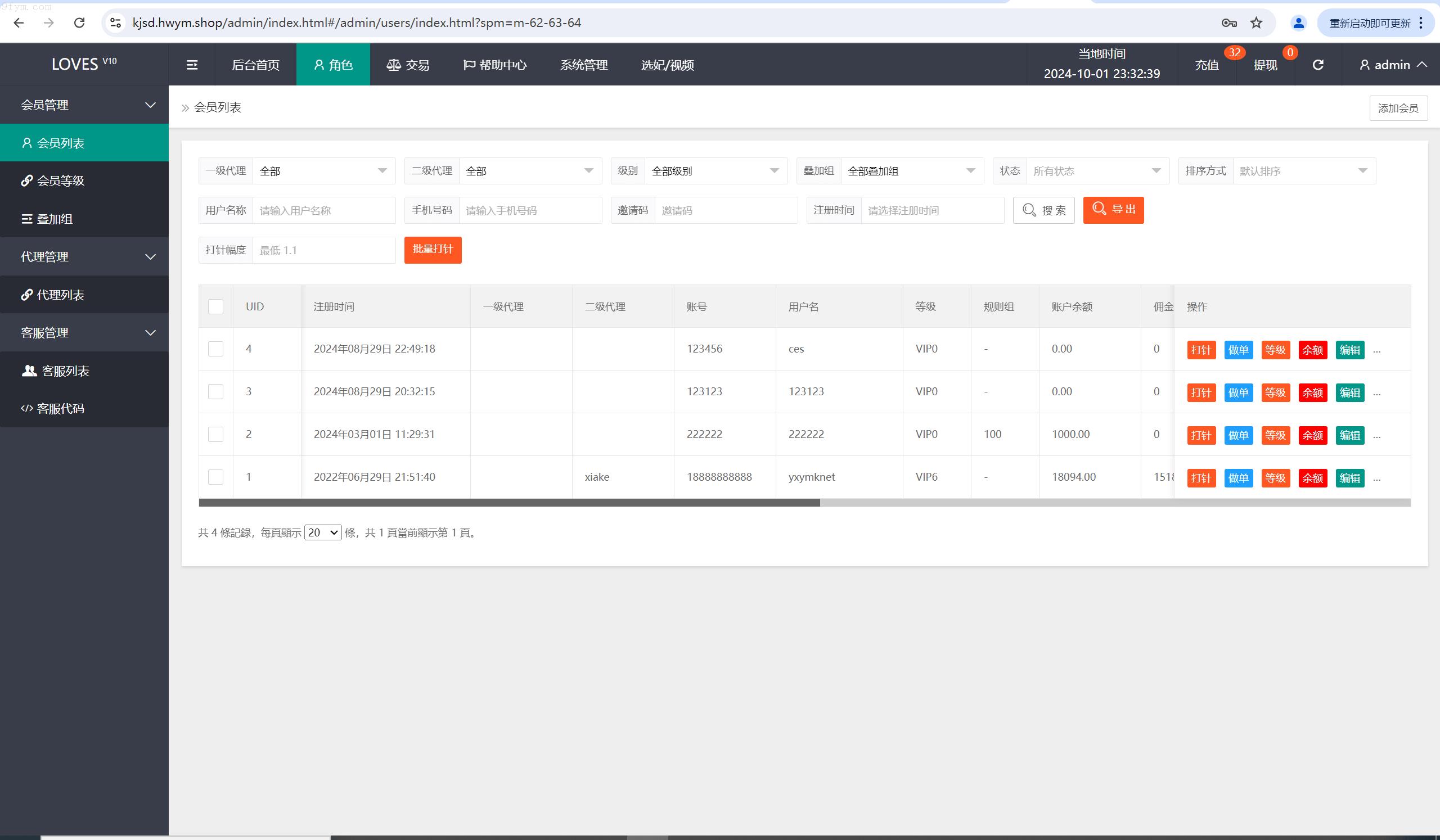
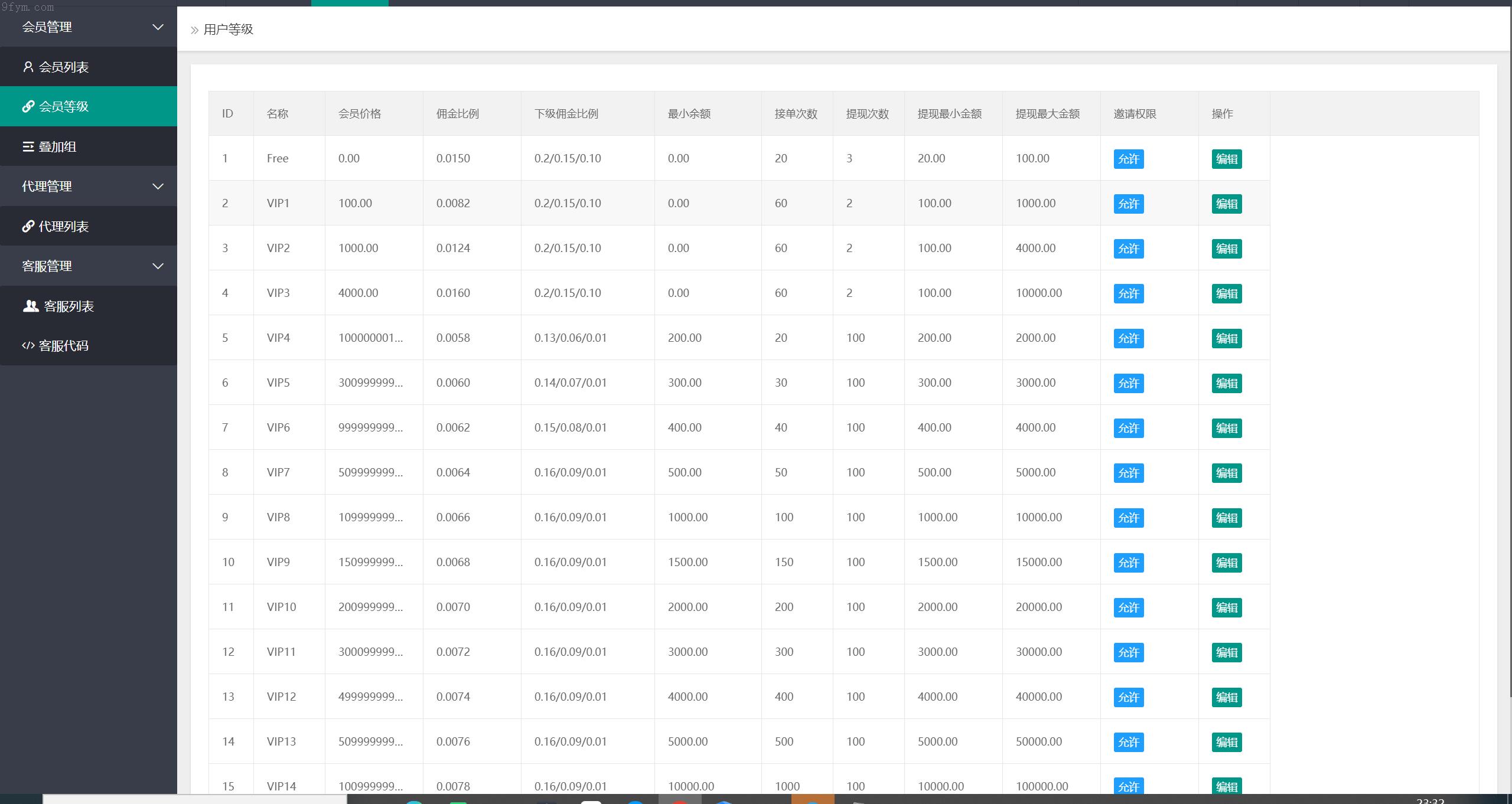
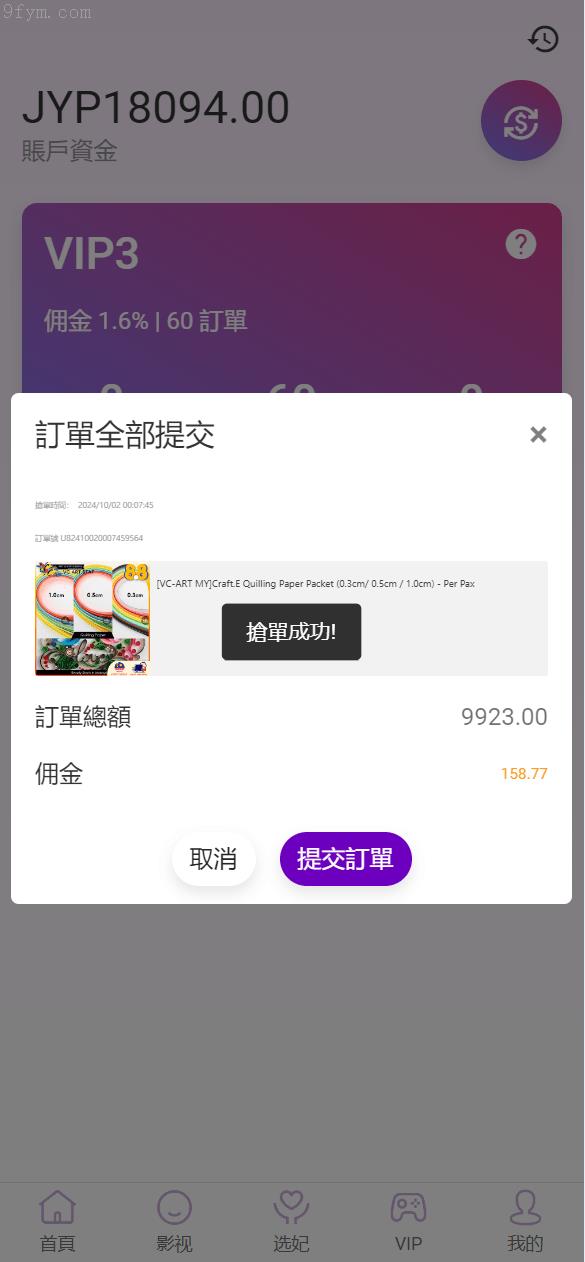
This is a multi-language support for airborne brush robotic system , including complete source code and detailed tutorials . Whether it is the front-end display or back-end logic, all open-source design, to facilitate the user's secondary development and functionality expansion. The system is especially suitable for overseas markets, support for multiple language switching to meet the habits of users in different regions.




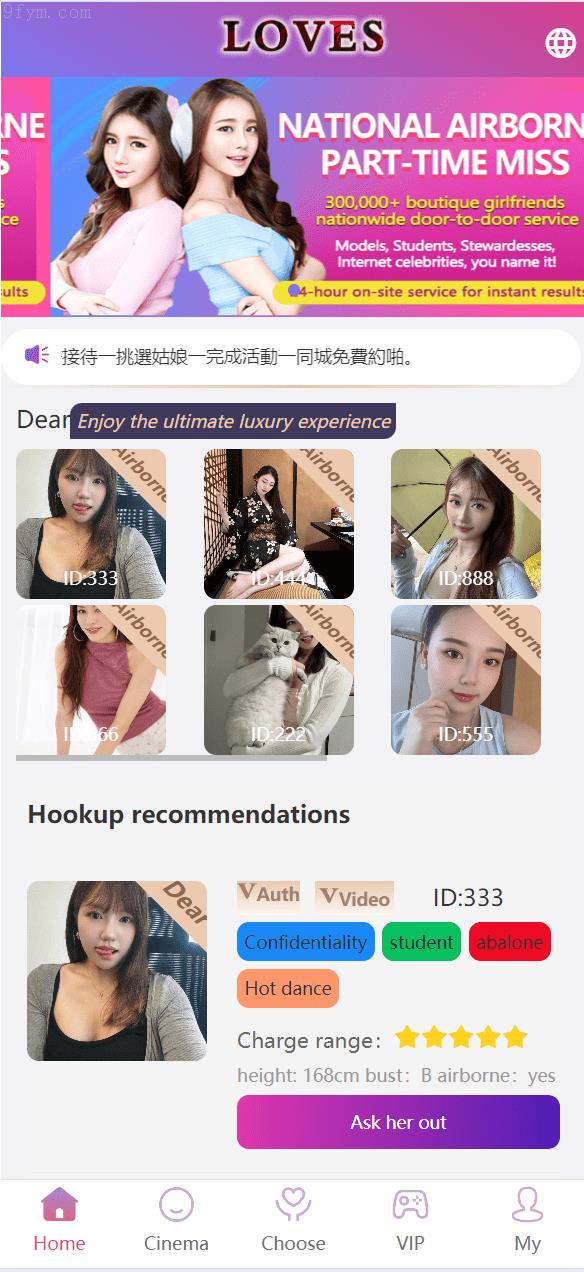



The core advantage of this system is its high flexibility and customisability. The front-end part adopts a multi-language support framework, which can be easily adapted to global language environments, providing users with a more friendly interactive experience. At the same time, the system also provides detailed technical documentation and operation guide, even beginners can quickly get started and complete the deployment.
For experienced developers, this open source system even provides a wealth of customisation space. Whether it is optimising algorithms, improving interface design, or integrating third-party services, it can be freely adjusted according to actual needs. In addition, the system's architecture is designed with performance and stability in mind, so that it can maintain smooth operation even in highly concurrent scenarios.
Functional features
1. Support multi-language switching, covering the mainstream international languages
2. Open source code, supporting deep customisation
3. Provide detailed tutorials to facilitate learning and deployment
4. Optimised for overseas robbing scenarios
5. Efficient and stable system architecture for large-scale applications